







امروزه لیزر در بسیاری از حوزهها از بازی و سرگرمی گرفته تا پزشکی و کشاورزی و نظامی کاربرد گستردهای پیدا کرده است. یکی از مهمترین چـالشهای سامانههای لیزری، هدایت باریکه لیزر (پرتو لیزر) به سمت موقعیت خاص با دقـت زیاد میباشد. این امر به روشهای گوناگونی انجام گرفته است که یکی از معروفترین آنها آینههای متصل به یک موتور الکتریکی میباشد که با کنترل زاویه آینه میتوان پرتو را هدایت کرد.
در روشهای انجامگرفته تا کنون، موقعیت پرتو بهصورت آفلاین و از پیش تهیه شده به سامانه داده شده و هدایت صورت میگیرد و کنترل بهصورت حلقه باز و در فواصل بسیار کوتاه (در حد چند سانتیمتر) است.
در این پروژه بهصورت آنلاین موقعیت هدف که یک توپ فوتبال پلاستیکی میباشد و در فاصله 12 متری قرار دارد، بهصورت آنلاین شناسایی شده و پرتو لیزر نور مرئی قرمزرنگ با توان 200 میلیوات به کمک یک حلقه کنترل و عملگرهای آینههای متحرک به سمت هدف هدایت خواهد شد. جهت تشخیص موقعیت هدف از دوربین و پردازش تصویر کمک گرفته شده است و همچنین موقعیت پرتو نیز جهت ایجاد کنترل حلقه بسته، به کمک همان دوربین صورت گرفته است. تشخیص این دو مورد به کمک دوربین باتوجهبه ابعاد کم پرتو و هدف و همچنین نیاز به یک حلقه کنترل فرکانس بالا، کار بسیار پر چالشی است که در این پروژه بهصورت کامل بررسی و مرتفع شده است.
در این گزارش نحوه ساخت سامانه موردنظر و نتایج عملکرد آن آمده است. مطابق نمودارهای موجود در این مقاله، سامانه توانسته با دقت بسیار بالایی هدف متحرک را دنبال کند و خطای ردیابی در فاصله دوازدهمتری به زیر دو سانتیمتر برسد.
واژگان کلیدی: هدایت پرتو لیزر، پردازش تصویر، هد اسکنر گالوو، موقعیتیابی با دوربین، بینایی ماشین

امروزه لیزر در حوزههای مختلف کاربرد گستردهای پیدا کرده است و از حوزههای بازی و سرگرمی، نمایش فیلم، اندازهگیری و برشکاری تا حوزههای پزشکی و جراحی و حوزههای نظامی کاربرد دارد. در همه این کاربردها دو مسئله اساسی دیده میشود: پارامترهای لیزر مورداستفاده (مانند توان لیزر، طولموج پرتو و…) و سیستم هدایت پرتو لیزر. مسئله سیستم هدایت پرتو نهتنها در فرستندههای پرتو لیزر چالش جدی است، بلکه در سامانههای دریافتکننده پرتو لیزر (آشکارساز پرتو لیزر) نیز مورد اهمیت است.
در این پژوهش، هدف طراحی و ساخت سامانه سیستم هدایت پرتو لیزر میباشد. در این سامانه هدف آن است که بتوان یک هدف متحرک که یک توپ فوتبال در فاصله دوازدهمتری میباشد را در وهله اول شناسایی و سپس مورد اصابت پرتو لیزر قرار داد. آنچه تا کنون در سامانههای هدایت پرتو لیزر نظیر دستگاههای حکاکی و غیره ساخته شده است، “هدف” از قبل مشخص است و مختصات آن در قالب یک فایل از پیش تهیه شده به دستگاه اعلام میشود؛ اما در این پروژه “هدف” متحرک بوده و در فاصله زیادی از منبع لیزر قرار دارد و موقعیت آن بهصورت آنلاین شناسایی شده و مورد اصابت پرتو لیزر قرار خواهد گرفت.
در این پژوهش برای پیداکردن موقعیت هدف و موقعیت پرتو لیزر از دوربین و پردازش تصویر کمک گرفته شده است که یکی از چالشهای اصلی آن پیداکردن موقعیتهای این دو بهصورت دقیق است که در این پژوهش بهصورت مفصل دوربین و پردازش تصویر جهت موقعیتیابی بررسی شده و چالشهای آن مرتفع گردیده است. همچنین جهت کنترل باریکه، از هد اسکنر گالوو کمک گرفته شده است که در ادامه در مورد علت این انتخاب و شیوه عملکرد آن توضیح داده خواهد شد.
یکی از بهترین و معروفترین روشهای مکانیزم تنظیم زاویه پرتو، آینههای فرمانپذیر سریع میباشد. این مکانیسم شامل آینههای سبکوزنی هستند که توسط محرکهای الکترومکانیکی تعبیهشده در پشت آینه، هدایت میشوند. انتخاب مکانیسم فعالسازی توسط پاسخ فرکانس موردنیاز آینه انجام میشود. در واقع پـارامترهای: فرکـانس (پهنای باند)، وزن و ابعاد آینه، رنج تغییرات زوایـا و… تعیینکننده نوع محرک الکتریکی میباشد که معروفترین آنها درایور پیزوالکتریک است. درحالیکه خطاهای زاویهای مشابه پیروسکوپ، همچنان تأثیر دوبرابری بر پرتو خروجی دارند؛ اما ازآنجاییکه این سامانهها عموماً دارای یک حسگر و سیستم بازخورد هستند، تا زمانی که پاسخ فرکانسی و محدودیتهای تفکیک محرک به آنها نرسیده باشد، معمولاً میتوان پرتو را روی هدف نگه داشت. دو نوع معروف از آینههای فرمانپذیر آینههای ممز فرمانپذیر و هد اسکنرهای گالوو میباشند که در ادامه معرفی میشوند:
الف) آینههای ممز: در این روش جهت هدایت پرتو لیزر از آینههای MEMS کمک گرفته میشود. این آینهها در ابعاد میکرون ساخته میشوند و در داخل یک قطعه الکترونیکی عرضه میشوند. آینه درون آن مانند یک دیافراگم در دو یا سه راستا تغییر زاویه داده و پرتو تابیده شده به آن را هدایت میکند.
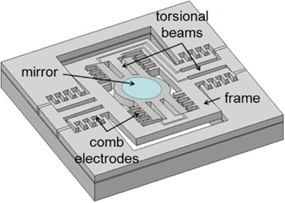
شکل 1: نحوه عملکرد آینههای MEMS
همانطور که در شکل 1 مشاهده میشود، یک آینه در ابعاد کوچک (با قطر در حد چند میلیمتر) در وسط IC الکترونیکی قرار گرفته است و این آینه به چهار طرف به شکلی متصل شده است که با تغییر طول نقطه اتصال، آینه مانند یک دیافراگم تغییر زاویه میدهد. این آینهها در پکیجهایی مانند شکل عرضه میشوند.

شکل 2: یک نمونه چیپ الکترونیکی آینههای MEMS
مهمترین مزیت این آینهها عبارتاند از:
مهمترین عیب آنها کوچـک بودن ابعاد آینهها (با قطر در حد چند میلیمتر) و تغییر زاویه محدود (در حد چند درجه) و هزینه بـالا میباشد. البته در اکثر پروژهها این ابعاد و تغییرات زاویه کفایت میکند؛ ولی درصورتیکه این مورد کافی نباشد میتوان تنظیم حدودی جهت پرتو را به کمک روش موتورهای گالوو انجام داد و سپس تنظیم دقیق و نهایی آن را به کمک این آینهها انجام داد.
ب)هد اسکنر گالوو: موتورهای گالوو[1] برای جابهجاییهای کوچک ولی با سرعت بالا و دقت بالا ساخته شدهاند. نحوه عملکرد این نوع از سامانههای هدایت پرتو لیزر در شکل 3 نشان داده شده است.
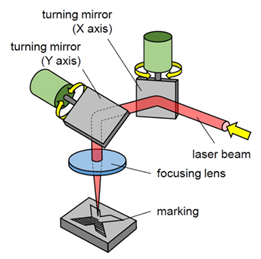
شکل 3: نحوه عملکرد سامانه هدایت پرتو لیزر به کمک موتورهای گالوو
گالوو موتورها درواقع نوعی از موتورهای آنالوگ درجهای هستند که امروزه کاربردهای بسیار دارند؛ اما چیزی که این موتورها را بسیار کاربردیتر کرده است نصبشدن یک انکودر[2] دقیق در قسمت پشت یک گالوو است که باعث میشود این موتورهای زاویهای را بسیار کارآمد و دقیق کند. عملکرد داخلی این نوع از موتورها شبیه گالوانومترها میباشد که از یک سیمپیچ و یک آهنربای دائم تشکیل شده است. کاربرد این موتورها امروزه روبهافزایش است چرا که با نصب دو عدد از این موتورها در کنار هم به همراه نصب دو آینه مخصوص روی محور این موتورهای دقیق، میتوان پرتوی لیزر را از طریق کنترل دقیق موتورهای گـالوو هدایت کرد؛ به این صورت که بـا جابهجاکردن آینهها، هدایت پرتو لیزر نیز انجام میگیرد. این روش امروزه در دستگاههای حکاکی بسیار مورداستفاده قرار میگیرد. پکیجهایی که در شرکتها برای آینههای گالوو ارائه میشوند در دو قالب تهیهشدهاند: آینههای گالوو تکمحور و هد اسکنر دوبعدی. این دو مورد در شکل 4 و شکل 5 نشاندادهشده است.

نحوه قرارگیری آینهها در داخل هد اسکنر گالوو بهصورت شکل 6 میباشد.

شکل 6: نحوه قرارگیری دو موتور در هد اسکنر گالوو
آنچه بیشتر در دستگاههای حکاکی و سامانههای هدایت پرتو لیزر استفاده میشود هد اسکنر گالوو است. این اسکنرها معمولاً طولموج لیزرهای YAG,Co2,Fiber را پشتیبانی میکنند و همچنین تا حدود یک کیلوهرتز پهنای بـاند دارند. بهعنوانمثال مشخصات یک نمونه رایج SG-7110 در جدول 1 آورده شده است.
جدول 1: مشخصات یک نمونه معروف هد اسکنر گالوو
| پارامتر | مقدار |
| دمای کار | 0-45 درجه سانتیگراد |
| خطیبودن | 99.9 درصد |
| زمان تنظیم | 0.4 میلیثانیه |
| مقیاس جریان | دو آمپر |
| ولتاژ کاری | 15 ولت |
| حداکثر زاویه اسکن | 15 درجه |
| پهنای باند موتور گالوو | 800 هرتز |
اجزای الکتریکی سامانه در شکل 7 تا شکل 12 آمده است. مشخصات فنی هر قطعه در زیر نویس شکل آمده است.
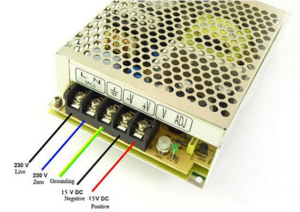
شکل 7: منبع تغذیه 15 ولت سه آمپر (تغذیه هد اسکنر و لیزر)

شکل 8: لیزر نور قرمز 200 میلی وات و برد درایور لیزر

شکل 9: هدر برد STM32F103C8T6 (جهت کنترل گالوو)

شکل 10: برد رزبری ورژن 4 با حافظه رم 8 گیگابایت

شکل 11: دوربین 12 مگاپیکسلی رزبری پای HQ به همراه لنز 16 میلیمتری تله فوتور

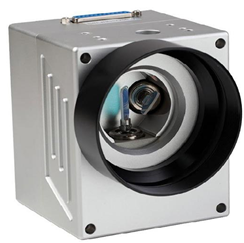
شکل 12: هد اسکنر گالوو نسخه SS-10-DA
این اجزا بهصورت شکل 13 به یکدیگر متصل شده اند.

شکل 13: اتصالات الکتریکی سامانه طراحی شده
الف) پـایه لیزر: به دلیل طراحی لیزرها در ابعاد و اندازه مختلف، در طراحی سامانه تدبیری اتخاذ شده است تا با تغییر لیزر نیاز به بازطراحی قطعات اصلی نباشد و با کوچکترین تغییر بتوان لیزر را تغییر داد. این امر به کمک یک نگهدارنده لیزر انجام شده است. نگهدارنده لیزر یک استوانه بوده که قطر خارجی آن ثابت میباشد و در محل مشخص شده در قطعه دوم قرار میگیرد؛ ولی قطر داخلی آن باتوجهبه ابعاد هر لیزر تغییر کردهاند تا لیزر موردنظر در درون آن بهصورت محکم قرار گیرد. این تغییر باید با دستگاه CNC انجام شود و برای تغییر لیزر تنها تغییر قطر داخلی این قطعه کافی خواهد بود. این نگهدارنده در شکل 14 نشان داده شده است. این پایه برای دو لیزر سبز و قرمزِ خریداری شده، طراحی و ساخته شده است.

ب) نگهدارنده لیزر و ستاپ اصلی: این قطعه بر روی هد اسکنر با چهار پیچ نصب شده و چهارپایه نگهدارنده دوربین و رزبریپای بر روی آن نصب میشود. همچنین در این قطعه، دایرهای در نظر گرفته شده است که نگهدارنده لیزر در آن سوراخ قرار میگیرد. مکان سوراخ لیزر دقیقاً در مرکز تعیینشده بر روی هد اسکنر میباشد تا پرتو دقیقاً به مرکز آینه اول تابیده شود. همچنین اطراف این قطعه لبهدار شده است تا بهخوبی بر روی هد اسکنر قرار گیرد و بتواند وزن کل سامانه را تحمل کرده و در جابهجاییها قطعه مشکل ایجاد نشود. این قطعه در شکلهای زیر نشان داده شده است.

شکل 15: قطعه دوم: نگهدارنده لیزر و ستاب اصلی

شکل 16: قطعه دوم: نگهدارنده لیزر و ستاب اصلی از نمایی دیگر
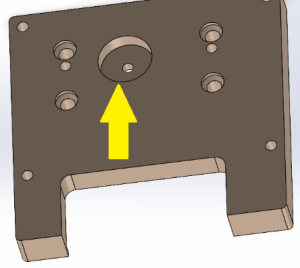
شکل 17: مکان قرارگیری پایه لیزر، باتوجهبه قطر طراحی شده با فشار اندک در محل قرار میگیرد
پ) نگهدارنده دوربین و برد رزبریپای: این قطعه که بهصورت یک چهارپایه طرحی شده است بر روی قطعه دوم پیچ میشود. بر روی آن مکانی در نظر گرفته شده تا دوربین نصب شود. نصب دوربین به کمک یک پیچ انجام میشود و طوری طراحی شده است که همراستای محورهای آینهها باشد. همچنین اگر دقت شود بر روی صفحه آن محل چهار پیچ قرار دارد که این مکان قرارگیری برد رزبریپای میباشد. در این قطعه یک شیار برای عبور کابل فلت دوربین نیز در قسمت دوربین در نظر گرفته شده است. تصویر این قطعه در شکل 18 نشان داده شده است.

شکل 18: قطعه سوم: قطعه نگهدارنده دوربین و رزبری پای
ت) نگهدارنده برد آرم و برد درایور لیزر: این قطعه بهصورت مماس بر قطعه سوم و کنار چهارپایه نصب میشود و برد آرم و درایور لیزر بر روی آن قرار میگیرد. تصویر این قطعه در شکل 19 و شکل 20 نشان داده شده است.
شکل 19: قطعه چهارم: نگهدارنده برد آرم و برد درایور لیزر

شکل 20: قطعه چهارم: نگهدارنده برد آرم و برد درایور لیزر ( از نمای دیگر)
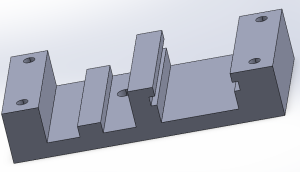
مونتاژ تمامی اجزا قبل از فرایند ساخت برای صحت سنجی در سالیدورک انجامگرفته است. تصاویر مونتاژ در شکل ، شکل 22 و شکل 23 نشان داده شده است.

شکل 21: مونتاژ قطعات در سالیدروک

شکل 22: مونتاژ قطعات در سالیدورک (از نمای دیگر)

شکل 23: مونتاژ قطعات در سالیدورک (از نمای دیگر)
بعد از انجام طراحی، ساخت قطعات به کمک ابزار تراش و مواد پلاستیکی فشرده صورت گرفته است. تصاویر ساخته شده قطعات در شکل 24 تا شکل 30 نشان داده شده است. این اشکال نحوه مونتاژ را نیز نشان میدهند.

شکل 24: قطعه اول و نحوه قرارگیری لیزر در آن

شکل 25: قطعه دوم و نحوه نصب آن بر روی گالوو

شکل 27: قطعه سوم و نحوه نصب آن

شکل 28: نحوه نصب دوبین و عبور کابل فلت آن

شکل 29: نحوه نصب قطعه چهارم و قرارگیری برد آرم

شکل 30: تصویر نهایی از مونتاژ کامل سامانه
همانطور که در ابتدا بیان شد، ساخت یک سیستم شبیهساز هدف خودکار از جهات زیر مورد اهمیت است:
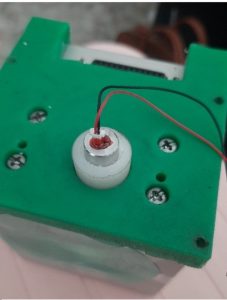
برای شبیهساز هدف یک حرکت پاندولی به کمک یک استپر موتور بهصورت زیر ایجاد شده است. این شبیهساز بهخوبی حرکت هدف را شبیهسازی میکند و در آزمونها از این روش کمک گرفته شده است.

شکل 31: تصویری از شبیهساز هدف ساخته شده ( نمای پشت)

شکل 32: تصویری از کنترلکننده شبیهساز

شکل 33: نحوه عملکرد شبیهساز هدف
در این بخش در مورد پردازش تصویر و پیدا کردن دو موقعیت مهم و اساسی در پروژه یعنی موقعیت هدف و موقعیت پرتو لیزر جهت بستهشدن حلقه کنترل پرداخته میشود. پردازش تصویر در این پروژه از دو جنبه مورد اهمیت است و بـاید علاوه بر موقعیتیابی پرتو لیزر و ایجاد یک کنترل حلقه بسته، موقعیت هدف را که بهعنوان مرجع کنترلی میباشد نیز به کمک دوربین به دست آورد. در بلوک دیاگرام شکل حلقه کنترل و جایگاه دوربین مشخص شده است.
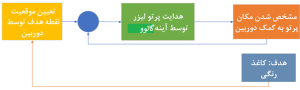
شکل 34: بلوک دیاگرام حلقه کنترلی سامانه و جایگاه پردازش تصویر
توجه شود که مراد از پردازش تصویر در این گزارش همان بینایی ماشین است و این موضوع تفاوت اساسی با مفهوم پردازش تصویر مرسوم دارد. در پردازش تصویر مرسوم هدف بهبود کیفیت تصاویر و فیلمها است که بتوان باکیفیت یا بزرگنمایی بیشتر با بهطورکلی تغییر در یک یا چند پارامتر درون تصویر جهت بهتر دیدهشدن است. در سطح بعدی ممکن است در پردازش تصویر هدف پیداکردن یک شیء یا نوشته (مثلاً خواندن متون یا پلاک خودروها) و یا دستهبندیکردن تصاویر باشد. در این نوع از کاربردهای پردازش تصویر هدف اصلی پارامترهای کیفی خودعکس است. اما در ادبیات بینایی ماشین، هدف استفادهکردن از تصویر در حلقه کنترل است و از تصویر برای کنترل جهان بیرون تصویر استفاده میشود. در بینایی ماشین ممکن است از الگوریتمهای پردازش تصویر رایج جهت بهبود یا بزرگنمایی تصویر استفاده شود؛ ولی کار به همینجا ختم نشده و هدف اصلی تغییر و کنترل دنیای بیرون تصویر (مثلاً کنترل موقعیت یک ربات بهصورت واقعی و نه در دنیای فیلم و تصویر) میباشد؛ لذا مفاهیم دقت، صحت، زمان حقیقی، تأخیر زمانی و… بسیار اهمیت پیدا میکند.
باتوجهبه این مباحث، آنچه در پردازش تصویر در این پروژه حیاتی است عبارت است از:
در ادامه روشهای پردازش تصویر مختلف بیان شده و پس از پیادهسازی، الزامات فوق بررسی میشود.
در این روش تصویر رنگی دریافت شده و باتوجهبه رنگ پرتو و هدف موقعیت تشخیص داده خواهد شد. برای این کار یک فیلتر بر روی تصویر اعمال میشود و تمامی مکانهایی که در محدوده رنگی خاصی هستند را مشخص کرده و نهایتاً مرکز آن رنگ موقعیت شیء برشمرده میشود. باتوجهبه اینکه پسزمینه در این پروژه سفید میباشد، این امکان وجود دارد. این روش الزام حجم محاسبات کم را تا حدی برآورده میکند چرا که اعمال فیلتر رنگ زمان محاسبات زیادی نمیگیرد؛ ولی پردازش تصویر رنگی محاسبات را تا حدی افزایش میدهد. ایراد اساسی این روش هنگامی است که پرتو لیزر و هدف به یکدیگر برسند و اثر تداخل دو رنگ، آن هم در تصویر رنگی بهشدت زیاد شده و موقعیتیابی دچار اختلال خواهد شد.
در این روش در تصویر به کمک الگوریتمهایی به دنبال موقعیت یک شکل خاص هندسی باید بود. بهعنوانمثال موقعیت مرکز یک شکل دایرهای با شعاع خاص تعیین میشود. در این روش مشکل تداخل روش قبلی تا حد زیادی برطرف میشود و چون هدف و پرتو دو شعاع کاملاً متفاوت دارد، تداخل به وجود نخواهد آمد. اما این روش دو ایراد اساسی دارد: اول آنکه حجم محاسبات پردازش تصویر بسیار زیاد خواهد شد و دوم تعیین پارامترهای دایره در پردازش تصویر بسیار مشکل خواهد بود و با تغییر کوچکی در شرایط محیطی (مانند نور و فاصله) این پارامترها را دچار خطای شدید خواهد کرد و میبایست مدام سامانه متناسب شرایط تنظیم شود.
در این روش چون تصویر رنگی نمیباشد حجم محاسبات بسیار کاهش پیدا میکند. در اینجا باتوجهبه اینکه پرتو لکهای نورانی رنگی است، در تصویر بهصورت لکهای بسیار سفید ظاهر خواهد شد و هدف نیز بهصورت رنگ تیره در نظر گرفته میشود تا در تصویر بهصورت لکه سیاه ظاهر شود. بعد از دریافت تصویر، موقعیت مشابه فیلتر رنگ در یک تصویر سیاهوسفید انجام خواهد شد و مرکز نقاط سفید بهعنوان مختصات پرتو و مرکز نقاط سیاه بهعنوان هدف انتخاب خواهد شد. این روش مزایای زیر را دارد:
باتوجهبه این موضوعات بهترین روش این مورد یعنی موقعیتیابی در تصویر سیاهوسفید است. در شکل 35 تصویری از این روش که هدف و پرتو در آن قرار گرفته است نشان داده شده است. در این شکل پرتو لیزر نور قرمز بوده که بهصورت کاملاً سفید مشخص شده است.

شکل 35: یک نمونه از تصویر سیاهوسفید مشخص کننده پرتو و هدف
برای اینکه مختصات هدف و پرتو بهتر و بدون نویز اندازهگیری شود بهتر است که کیفیت تصویر قبل از پردازش تصویر بهبود پیدا کند. مهمترین و تأثیرگذارترین مورد در پردازش تصویر بهنحویکه بیان شد، میزان وضوح تصویر میباشد. با افزایش وضوح، به دلیل این که تصویر سیاهوسفید است و هدف سیاه و پرتو سفید میباشد، تمایز بین این دو و پسزمینه بیشتر خواهد شد.
یکی از راههای افزایش وضوح تصویر، روش خطی میباشد که همه مقادیر پیکسلها در ضریب مشخص ضرب شوند. این روش مناسب نیست چرا که نیاز است تا پیکسلهای با مقدار روشنایی کمتر، افزایش زیادی پیدا نکند؛ لذا از افزایش خطی که در شکل 36 نشان داده شده است کمک گرفته شده است. رابطه ریاضی بهصورت زیر است:
که در الگوریتم از گاما برابر 0.5 استفاده شده است.
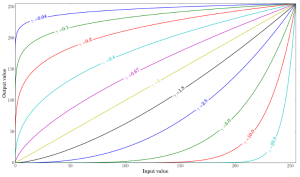
شکل 36: نمودار افزایش وضوح تصویر بهصورت غیرخطی به ازای گاماهای مختلف
پس از ساخت و راهاندازی سامانه و انجام آزمونهای اولیه و رفع مشکلات سامانه، کل سامانه و تمام حلقه کنترل مورد آزمون قرار گرفته است. در این بخش در مورد آزمونهای نهایی و نتایج آن صحبت میشود و تنظیم کنترلکننده نهایی سامانه و تکمیل جزئیات بیشتر حلقه بیان خواهد شد.
برای آزمون، دو حرکت متفاوت به شبیهساز هدف داده شده است. تصویر شبیهساز که مفصلاً در فصلهای قبلی بیان شد، بهصورت شکل 37 میباشد:

تصویر فریم دریافتی از دوربین و تشخیص موقعیتهای هدف و پرتو در شکل 38 نشان داده شده است. در شکل 38 دایره مشکی مربوط به مکان هدف و دایره سفید مربوط به مکان پرتو میباشد.

شکل 38: تصویر فریم دریافتی و پردازش شده توسط دوربین
در شکل 39 نتایج دنبال کردن هدف در دو آزمون متفاوت که دو نحوه متفاوت از حرکت هدف را ایجاد کرده، نشان داده شده است. همانطور که در شکل مشخص است حرکت هدف کاملاً نامنظم میباشد و این امر موجب خواهد شد تا سیگنال حرکت هدف طبق روابط ریاضی فوریه شامل فرکانسهای زیادی شود و بر خلاف یک سینوسی ساده این حرکت دینامیک بیشتری خواهد داشت و برای حلقه کنترل، که یک کنترل کننده PI می باشد و پارامترهای آن در بخش قبلی توضیحی داده شد، این دینامیک بالا یک چالش اساسی است و کنترلکننده بهخوبی توانسته است هدف را دنبال کند و حتی در آزمون دوم که هدف حرکت ناگهانی و نامنظمتری داشته این مورد به خوبی دنبال شده و در تصویر بزرگنمایی شده نتیجه بیشتر قابل مشاهده میباشد و مشخص است که حتی در حرکات خیلی سریع نیز خطا برای چند زمان نمونه برداری از حدود 10 سانتی متر ( باتوجهبه ابعاد هر پیکسل که در بخش کالیبراسیون توضیح داده شد) تجاوز نکرده و به سرعت به سمت سیگنال مرجع همگرا میشود. دنبال کردن هدف در دو راستای عمودی و افقی صورت گرفته است.
در شکل 40 و شکل 41 اندازه بردار خطای موقعیت هدف و لیزر بر حسب زمان در دو آزمون آورده شده است. همانطور که مشخص است خطا بسیار کم بوده و اگر بر حسب سانتی متر حساب شود ( باتوجهبه ابعاد هر پیکسل که در بخش کالیبراسیون توضیح داده شد) این خطا از 5 سانتی متر تجاوز نمیکند.
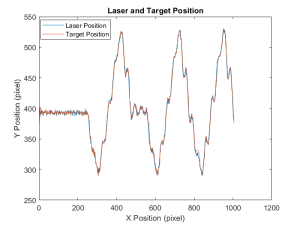
شکل 39: نمودار موقعیت هدف و پرتو در صفحه دوبعدی ( آزمون اول)
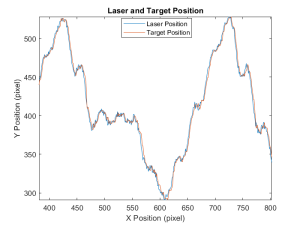
شکل 40: نمودار بزرگنمایی شده موقعیت هدف و پرتو در صفحه دوبعدی ( آزمون اول)
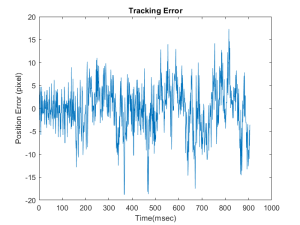
شکل 41: اندازه بردار خطای موقعیت بر حسب زمان ( آزمون اول)

شکل 42: نمودار موقعیت هدف و پرتو در صفحه دوبعدی ( آزمون دوم)

شکل 43: نمودار موقعیت هدف و پرتو در صفحه دوبعدی ( آزمون دوم)

شکل 44: اندازه بردار خطای موقعیت بر حسب زمان ( آزمون دوم)
زمان اجرای حلقه محاسبات در دو آزمون در نمودار زیر آورده شده است. همانطور که در فصل پردازش تصویر بیان شد، یکی از چالشهای اساسی در بینایی ماشین حجم محاسبات و اجرای حلقه کنترل بهصورت بلادرنگ میباشد که در شکل 45 بهخوبی نشان داده شده است که حلقه در زمان مشخص، یعنی اجرای حلقه در فرکانس 50 هرتز مطلوب که در بخش قبل بیان شد، بهصورت بلادرنگ اجرا شده و اجرای محاسبات موجب نامنظمی زمان اجرا نشدهاند.

شکل 45: زمان اجرای حلقه در آزمون نهایی
در این پروژه، هدف طراحی سامانه لیزری دنبالکننده هدف بود که باید این سامانه اولاً موقعیت هدف را بهصورت آنلاین تشخیص و ثانیاً آن را با دقت بالا و در فاصله زیاد دنبال میکرد. در اجرای پروژه تلاش شده تا موارد و چالشهای زیر بررسی و اجرا شود:
نتایج آزمون نهایی آزمون سامانه بهخوبی نشان میدهد که عملکرد سامانه در شرایط مختلف بسیار مطلوب بوده و قفلکردن پرتو بر روی هدف با دقت بالایی و در حد یک الی سه سانتیمتر انجامگرفته است. باتوجهبه این که در این پروژه هدف اثبات فناوری بوده است، این دقت با تجهیزات ارزانقیمت مورد قبول میباشد و در این گزارش بیان شد که برای افزایش دقت سامانه چه پارامترهایی باید در نظر گرفته شود.
در ادامه این پروژه پیشنهاد میشود که بهجای استفاده از دوربین از سنسورهای تشخیص تغییرات و تشخیص و دنبالکردن هدف متحرک استفاده شود تا اولاً حداقل تأخیر در حسگر وجود داشته باشد و ثانیاً دقت تشخیص موقعیت حتی در فواصل دورتر و با شرایط محیطی متفاوت بیشتر شود.
[1] Galvo Motors
[2] Encoder